عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید





Accelus Card 0 pages

Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547
Tech Support: E-mail: sales@copleycontrols.com, Web: http://www.copleycontrols.com Page 1 of 8
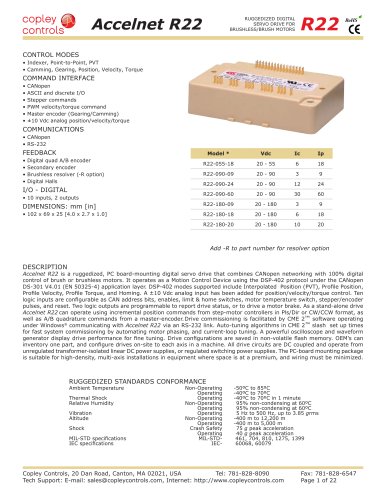
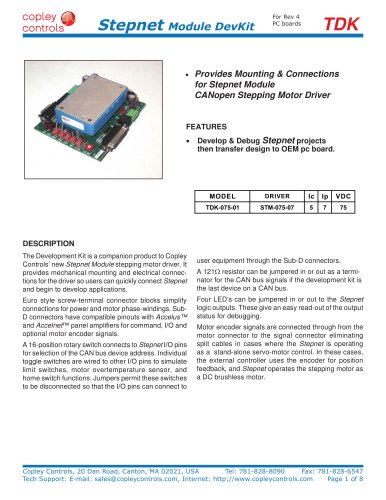
DIGITAL SERVO DRIVE
for BRUSHLESS/BRUSH MOTORS Accelus Card
RoHS
description
The Accelus™ servoamplifier drives DC brushless motors
in position, velocity, or torque modes with 100% digital
control. Commutation is sinusoidal using encoder feedback
from the motor. Hall signals are used for phase-initialization
and phase-correction eliminating motor hunting after
power-up.
Advanced field-oriented-control ensures the highest motor
torque over a wide speed range, minimizing motor heating
and maximizing efficiency. Digital control algorithms
transform AC stator currents into direct and quadrature
components. The torque-producing quadrature current is
controlled by the current loop, and the direct component is
driven to zero eliminating losses from current that doesn’t
produce torque. Space-vector modulation produces higher
speeds than sine-pwm modulation from the same buss
voltage.
CME 2™ software communicates with Accelus through an
RS-232 link for complete amplifier setup. Auto-phasing
and auto-tuning algorithms in CME 2™ slash set up times
for fast system commissioning and eliminate “re-wire and
try” so common in brushless motor installations. CME 2™
automates current loop tuning, as well as motor, Hall, and
encoder phasing. A powerful oscilloscope and signal generator
display amplifier performance for fine tuning thereafter.
Amplifier control parameters are saved in non-volatile flash
• PCB Mount
• Position, Velocity, and Torque Control
• Controller Interface
Stepper Interface
±10V Velocity / Torque Command
PWM Velocity / Torque Command
Electronic gearing
• Field-Oriented Control for
Optimal Speed / Torque
• Auto-Tuning and Auto-Phasing
• Feedback
Digital Encoder and Halls
• Programmable I/O:
6 inputs, 2 outputs
memory. OEM’s can inventory one part, and configure amplifiers
on-site to each axis in a machine.
Accelus™ works with motion controllers that close positionloops
using incremental encoder feedback and process the
position error in a PID filter to produce an amplifier command
for torque, force, or velocity. Only one +/-10V analog,
or a one or two-wire digital PWM/(DIR) control signal is
required. All commutation is done in the amplifier.
In position-mode, Accelus™ accepts two-wire digital stepmotor
control signals (CW/CCW, or Count/Direction), or
operates as a slave from a master encoder. The ratio between
input position pulses and motor position is programmable.
Velocity control is derived from motor encoder signals. Velocity
mode is useful not only for speed-setpoint applications,
but enables operation with PLC’s or controllers that output
position-error signals with no PID filtering.
All amplifier circuits are DC coupled and operate from
unregulated transformer-isolated DC power supplies, or
regulated switching power supplies.
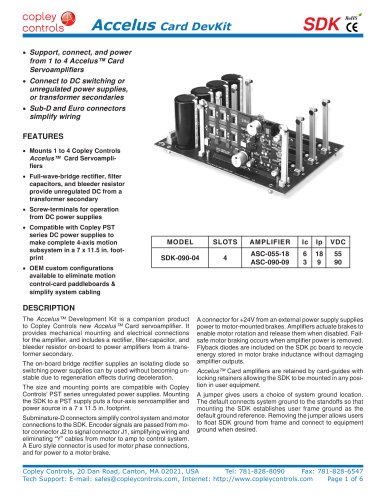
The package is a single board with no heatplate. Solderless
mating connectors on pc boards mount Accelus™ at 0° or
90°. Installation and replacement is fast and doesn’t damage
amplifier connections. A Development Kit is available that
mounts 1~4 Accelus™ amplifiers and provides unregulated
DC power from an isolation step-down transformer.
Model Ic Ip Vdc
ASC-055-18 6 18 55
ASC-090-09 3 9 90