عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید





Xenus Micro 0 pages

Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547
Web: www.copleycontrols.com Page 1 of 24
RoHS Xenus Micro
™
DIGITAL SERVO DRIVE
for BRUSHLESS/BRUSH MOTORS
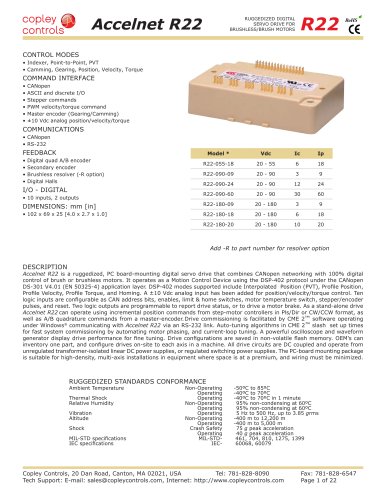
description
Xenus Micro is a compact, AC powered servo drive for position,
velocity, and torque control of AC brushless and DC brush motors.
It operates on a distributed control network, as a stand-alone
indexing drive, or with external motion controllers.
Feedback options now include brushless resolvers in addition to
digital quad A/B and analog sin/cos incremental encoders. The
multi-mode encoder port operates as an input or output for the
feedback signals. As an input, a secondary digital quad A/B encoder
is used for dual-loop position control. Resolver and sin/cos signals
are interpolated internally with programmable resolution and appear
as digital quad A/B signals when the port functions as an output. Or,
the digital quad A/B signals are simply buffered and made available
to the system controller, eliminating cumbersome Y-cabling to share
a single encoder with drive and control system.
Feedback Versions
• Analog Sin/Cos
• Quad A/B digital
• Resolver
Control Modes
• Indexer, Point-to-Point, PVT
• Camming, Gearing, Position, Velocity, Torque
Comand Interface
• CANopen/DeviceNet
• ASCII and discrete I/O
• Stepper commands
• ±10 Vdc position/velocity/torque command
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
• Digital inputs for indexer control
Comunications
• CANopen/DeviceNet
• RS232
Feedback
• Digital Quad A/B encoder
• Analog sin/cos encoder (-S versions)
• Resolver (-R versions)
• Secondary encoder / emulated encoder out
• Digital Halls
I/O - Digital
• 14 inputs, 4 outputs
Regen
• Internal
Dimensions: mm [in]
• 126 x 89 x 53 [5.0 x 3.5 x 2.1]
Model Vac Ic Ip
XSJ-230-02 100-240 1 2
XSJ-230-06 100-240 3 6
XSJ-230-10 100-240 5 10
* Add “-S” to part number for Sin/Cos version
Add “-R” to part number for Resolver version
Indexing mode simplifies operation with PLC’s that use outputs to
select and launch indexes and inputs to read back drive status.
A single serial port on the PLC can send ASCII data to multiple
drives to change motion profiles as machine requirements change.
DeviceNet capability enables multiple Xenus Micro drives to be
controlled from Allen-Bradley PLC’s.
CAN bus operation supports Profile Position, Profile Velocity, Profile
Torque, Interpolated Position, and Homing. Up to 127 Xenus Micro
drives can operate on a single CAN bus and groups of drives can be
linked via the CAN so that they execute motion profiles together.
Operation in torque (current), velocity, and position modes with
external motion controllers is supported. Input command signals
are ±10 Vdc (torque, velocity, position), PWM/Polarity (torque,
velocity), or Step/Direction (position).