عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید





Accelnet R210 pages

Accelnet R21
CONTROL MODES
•tIndexer, Point-to-Point, PVT
•tCamming, Gearing, Position, Velocity, Torque
COMMAND INTERFACE
•tCANopen
•tASCII and discrete I/O
•tStepper commands
•t±10V position/velocity/torque command
•tPWM position*/velocity/torque command
•tMaster encoder (Gearing/Camming)
COMMUNICATIONS
•tCANopen
•tRS-232
FEEDBACK
•tDigital quad A/B encoder
•tAux encoder / emulated encoder out
•tAnalog sin/cos encoder (-S versions)
•tBrushless resolver (-R versions)
•tDigital Halls
I/O - DIGITAL
•t9 inputs, 4 outputs
DIMENSIONS: mm [in]
•t97 x 64 x 33 [3.8 x 2.5 x 1.3]
RUGGEDIZED DIGITAL
SERVO DRIVE FOR
BRUSHLESS/BRUSH MOTORS
R21
Model *
Ic
Ip
R21-055-09
20-55
3
9
R21-055-18
20-55
6
18
R21-090-03
20-90
1
3
R21-090-09
20-90
3
9
R21-090-12
* R21-R models
Vdc
20-90
6
RoHS
12
* Note:
Add “-S” to part number for Sin/Cos version
Add “-R” to part number for resolver version
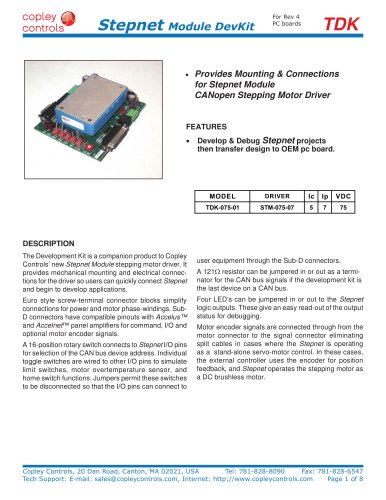
DESCRIPTION
Accelnet R21 is a compact, DC powered servo drive for position, velocity, and torque control of AC brushless and DC brush motors. It can operate
on a distributed control network, as a stand-alone indexing drive, or with external motion controllers. Two versions are available to support digital
quadrature, or analog sin/cos encoders.
Indexing mode enables simplified operation with PLC’s which use outputs to select and launch indexes and inputs to read back drive status.
Additionally, a PLC can send ASCII data that can change motion profiles so that one index can perform various motions as machine requirements
change.
The CANopen distributed control architecture is also supported. As a CAN node operating under the CANopen protocol, it supports Profile Position,
Profile Velocity, Profile Torque, Interpolated Position, and Homing. Up to 127 drives can operate on a single CAN bus and groups of drives can
be linked via the CAN so that they execute motion profiles together.
Operation with external motion controllers is possible in torque (current), velocity, and position modes. Input command signals can be ±10V
(torque, velocity, position), PWM/Polarity (torque, velocity), or stepper format (CU/CD or Step/Direction).
RUGGEDIZED STANDARDS CONFORMANCE
Ambient Temperature
Thermal Shock
Relative Humidity
Vibration
Altitude
Shock
MIL-STDtspecificationst
IECtspecificationst
Non-Operating
Operating
Operating
Non-Operating
Operating
Operating
Non-Operating
Operating
Crash Safety
Operating
MIL-STD-t
IEC-t
-50ºC to 85ºC
-40ºC to 70ºC
-40ºC to 70ºC in 1 minute
95% non-condensing at 60ºC
95% non-condensing at 60ºC
5 Hz to 500 Hz, up to 3.85 grms
-400 m to 12,200 m
-400 m to 5,000 m
75 g peak acceleration
40 g peak acceleration
t461,t704,t810,t1275,t1399
t60068,t60079
Copley Controls, 20 Dan Road, Canton, MA 02021, USA
Tel: 781-828-8090
Tech Support: E-mail: sales@copleycontrols.com, Internet: http://www.copleycontrols.com
Fax: 781-828-6547
Page 1 of 24