عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید





ECX SPEED 8 M Ø8 mm, brushless, with Hall sensors0 pages

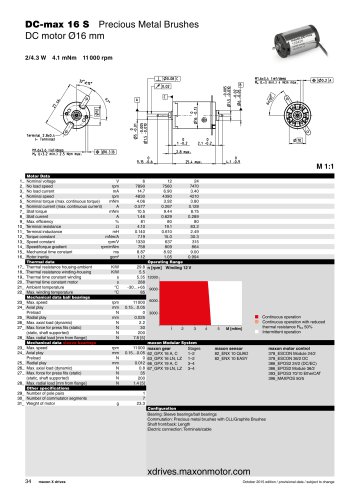
ECX SPEED 8 M brushless
BLDC motor Ø8 mm
High Power
3/6.0 W 1.24 mNm 50 000 rpm
Connector:
8 pole, 1.27 mm, MICA08
Lumberg Connect GmbH
Connector:
4 pole, 1.27 mm, MICA08
Lumberg Connect GmbH
M 3:2
Motor Data
1_
2_
3_
4_
5_
6_
7_
8_
9_
10_
11_
12_
13_
14_
15_
16_
Nominal voltage
V
No load speed
rpm
No load current
mA
Nominal speed
rpm
Nominal torque (max. continuous torque)
mNm
Nominal current (max. continuous current)
A
Stall torque
mNm
Stall current
A
Max. efficiency
%
Terminal resistance
W
Terminal inductance
mH
Torque constant
mNm/A
Speed constant
rpm/V
Speed/torque gradient
rpm/mNm
Mechanical time constant
ms
Rotor inertia
gcm2
17_
18_
19_
20_
21_
22_
Thermal resistance housing-ambient
Thermal resistance winding-housing
Thermal time constant winding
Thermal time constant motor
Ambient temperature1
Max. winding temperature
6
37900
88.2
28000
1.24
0.913
4.91
3.34
71
1.8
0.0264
1.47
6500
7940
2.08
0.025
Thermal data
K/W
K/W
s
s
°C
°C
51.2
4.11
0.906
154
-20…+85
125
rpm
mm
N
50 000
0…0.07
0.3
pull
preloaded
0.2
10
10
2 [2]
Mechanical data ball bearings
23_ Max. speed
24_ Axial play
Preload
Direction of force
25_ Radial play
26_ Max. axial load (dynamic)
27_ Max. force for press fits (static)
(static, shaft supported)
28_ Max. radial load [mm from flange]
N
N
N
N
Other specifications
29_
30_
31_
32_
Number of pole pairs
Number of phases
Weight of motor
Typical noise level [rpm]
g
dBA
9
31400
43.4
22500
1.24
0.5
4.53
1.7
71
5.3
0.0888
2.67
3580
7110
1.73
0.025
12
33000
35.2
24300
1.24
0.393
4.85
1.43
72
8.38
0.144
3.39
2820
6980
1.69
0.025
Operating Range
1.13
n [rpm] Winding 9 V
60000
50000
40000
30000
20000
0
0
0.5
Connection B (flat band cable AWG 28, pitch 1.27 mm)
Pin 1
Motor winding 1
Pin 2
Motor winding 2
Pin 3
Motor winding 3
Pin 4
N.C.
1
1.5
2
M [mNm]
maxon Modular System
maxon gear
1 56_GPX 8 A
3
6
49 [50 000]
Connection A (flat band cable AWG 28, pitch 1.27 mm)
Pin 1
Motor winding 1
Pin 2
Motor winding 2
Pin 3
Motor winding 3
Pin 4
VHall 1.6…5.5 VDC
Pin 5
GND
Pin 6
Hall sensor 1
Pin 7
Hall sensor 2
Pin 8
Hall sensor 3
Output signal: CMOS compatible
Output current per channel: max 0.5 mA
Continuous operation
Continuous operation with reduced
thermal resistance Rth2 50%
Short term operation
10000
Stages
1–5
Configuration
Shaft front: length
Electric connection: cable length
Cable insulation: PVC/PO/FEP
maxon sensor
for motor type B:
80_ENX 8
81_ENX 8 Abs.
maxon motor control
378_ESCON Module 24/2
379_ESCON 36/3 EC
379_ESCON Module 50/4 EC-S
382_DEC Module 24/2
386_EPOS2 24/2
386_EPOS2 Module 36/2
Notes
For type A:
PVC-cable (-20…85°C)
PO- and FEP cable (-30…85°C)
For type B:
PVC-cable (-20…100°C)
PO- and FEP cable (-40…100°C)
1
Adapter Micromotor (Part number 498157)
required for all maxon controllers.
xdrives.maxonmotor.com
October 2015 edition / provisional data / subject to change
maxon X drives
41
"