عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید





Analogue Driver PMCM310 pages

PiezoMotor Driver PMCM31
•t
•t
•t
•t
Nanometer resolution
Analog control
Low power consumption
Small size
Quick Start
1.t Important note before connecting terminals:
● +12V terminal is not overvoltage protected and
should be within ±0.5 V.
● An signal should not exceed ±20 V.
● Rst signal should be open collector (active low).
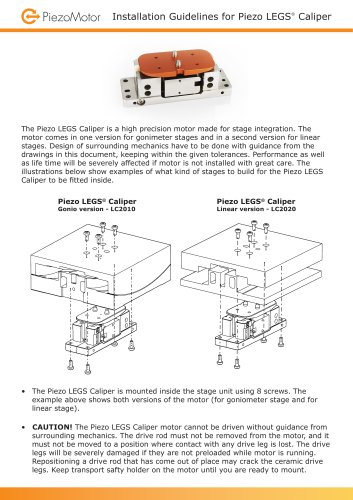
2.t Connect a Piezo LEGS to the motor connector on
the PMCM31 front panel.
The PMCM31 is a 1-axis analog driver for use with
Piezo LEGS motors from PiezoMotor. The driver enables
single digit nanometer positioning in combination with
mm/s speeds.
3.t Connect the +12V and GND terminals to a
Functional principle
4.t Connect a ±9.6 V adjustable voltage source to the
The driver controls the Piezo LEGS motor by feeding
waveform signals which elongates and bends each of the
piezo drive legs. The waveforms are specially designed
to make the motor drive legs perform a precise walking
motion. The motion of the drive legs is transferred via
friction contact to a linear rod or to a rotary disc.
For each waveform cycle the Piezo LEGS motor will take
steps, by definition called waveform-steps (wfm‑steps).
The wfm‑step length is load dependant and also depends
on the signal phase shift. With maximum phaseshift
(90˚) the step size is in the range of a few micrometers
for a linear Piezo LEGS motor. Rotary Piezo LEGS motors
have their drive legs working on the perimeter of a drive
disc. The wfm-step angle depends on the diameter of
the rotary motor but is usually less than one milliradian.
The maximum step length (and hence the speed) is
reduced by internal phase shifting of the waveform
signal, and fine positioning is performed through analog
bending of the drive legs. The user of the PMCM31 driver
will only need to change the control signal voltage level
in order to go from full step size down to high precision
positioning.
stabilized 0.3 A power supply with an output
voltage of 12 ±0.5 V.
An and GND terminals.
5.t At power on the driver checks the capacitance of
the motor (phase 1). After this check, the LED is
turned ON. If the LED remains OFF, please check
the power supply.
6.t The following error indication may occur: If LED
starts blinking after power ON, this indicates that
motor capacitance check failed, e.g. no motor is
connected (or motor is broken).
7.t After power ON the driver will wait until An=0 V
in order to prevent motor motion if no external An
signal is available.
8.t Motor is now ready to run, varying the voltage of
the An signal to create motion. For an An voltage
level less than ±0.6 V the motion is extremely
slow. Below ±0.3 V the motion is stopped. For
voltage level above ±0.6 V the motor velocity is
set according to figure 1. Positive voltages refer to
forward motion.